您好!歡迎訪問北京津發(fā)科技股份有限公司網(wǎng)站!
當(dāng)前位置:首頁(yè) > 產(chǎn)品中心 > > 動(dòng)作捕捉與生物力學(xué) > ErgoLAB Vehicle車輛狀態(tài)分析模塊



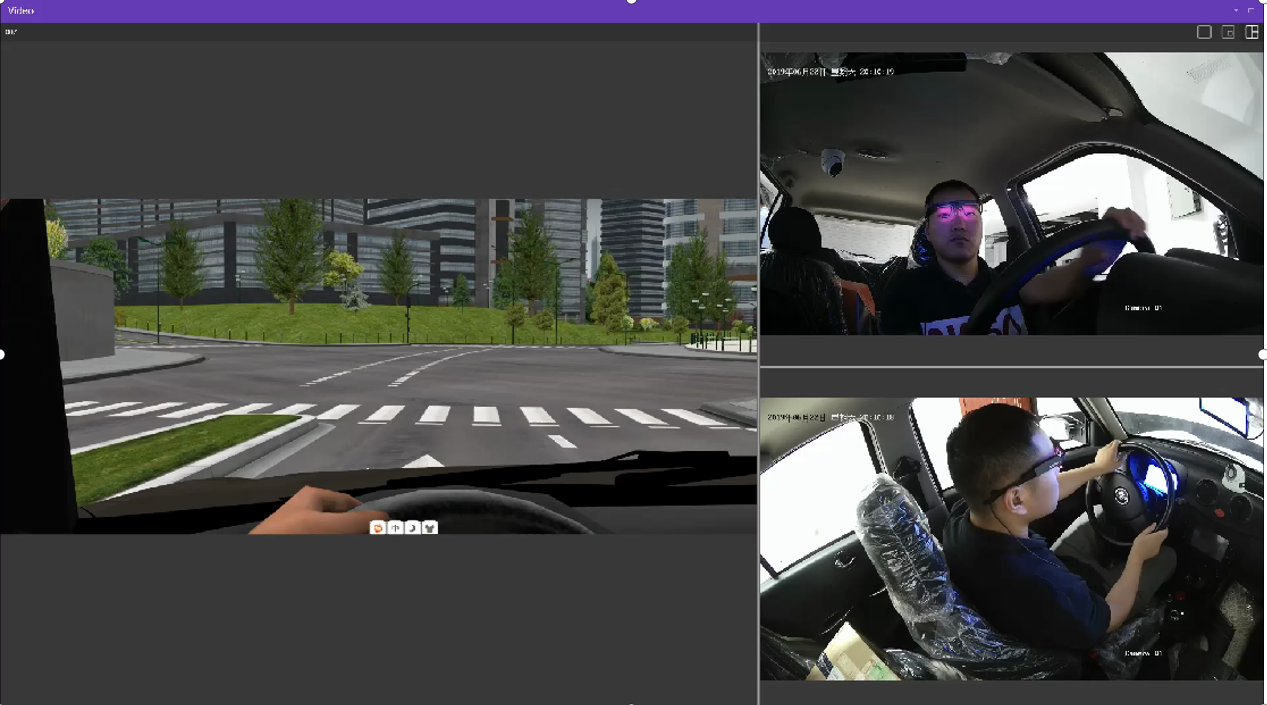
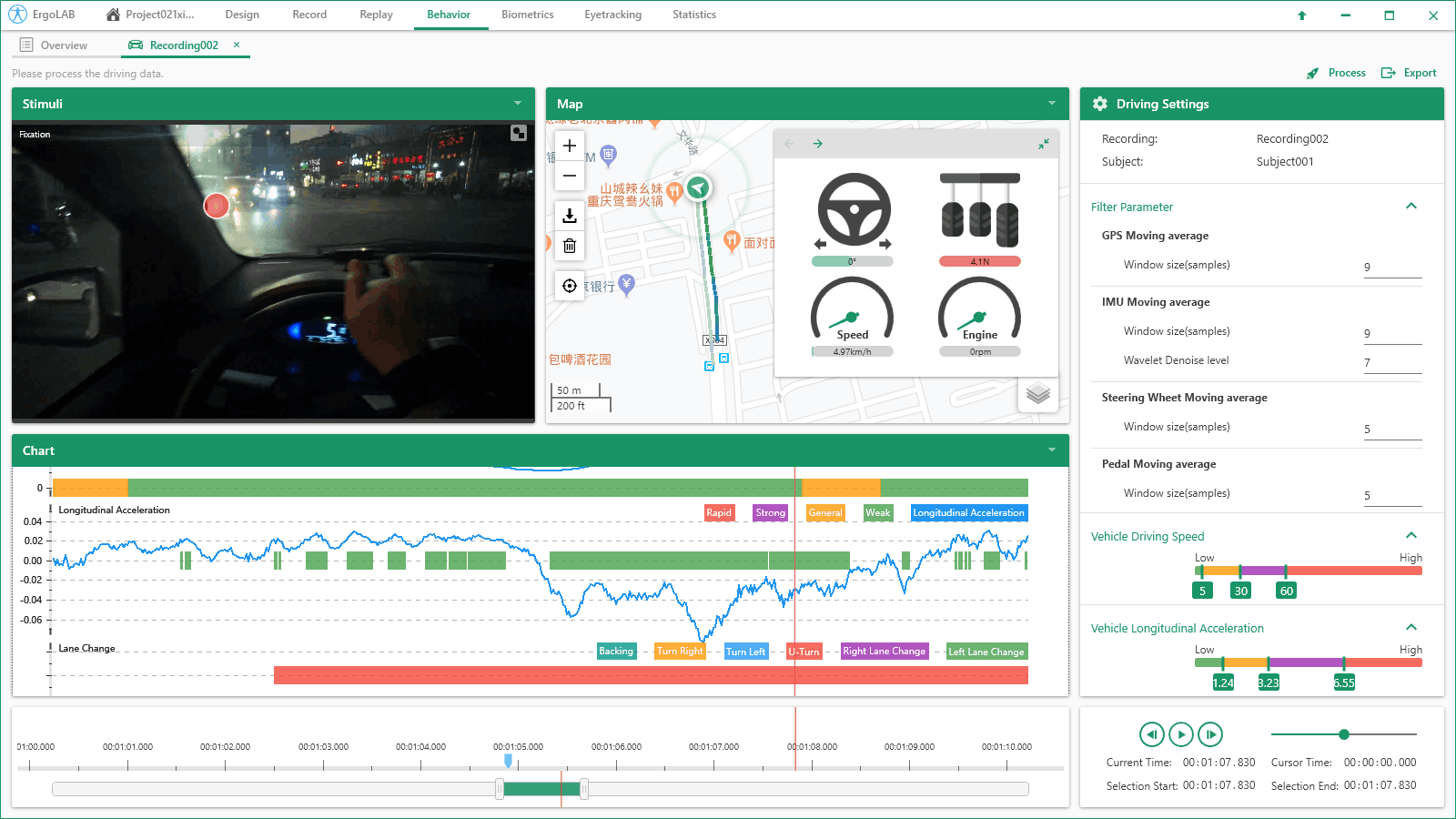
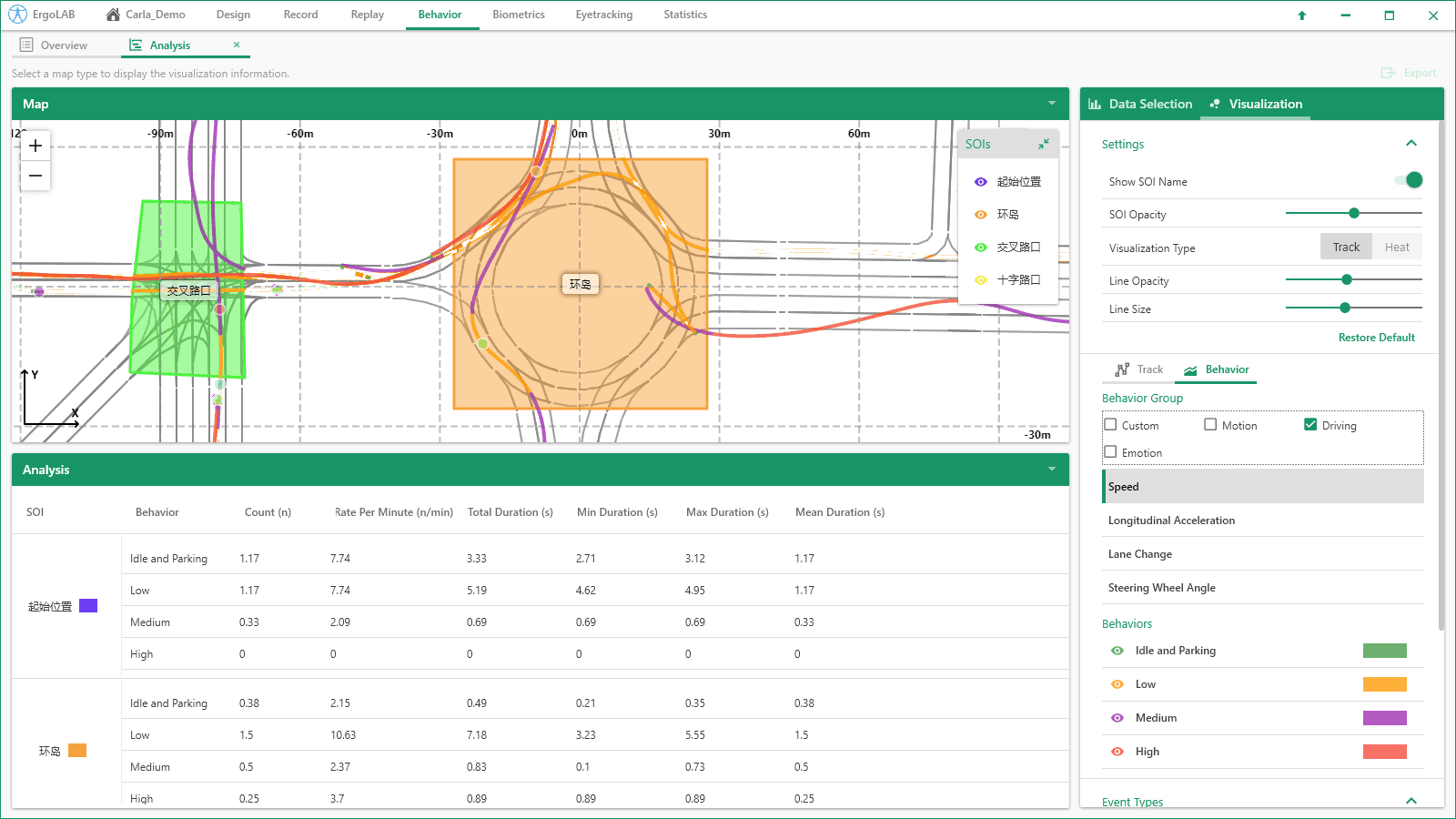
簡(jiǎn)要描述:ErgoLAB人車路環(huán)境測(cè)試云平臺(tái)是基于云架構(gòu)的專業(yè)用于“以人為中心"的多模態(tài)數(shù)據(jù)同步采集和定量化分析平臺(tái),專注于駕駛心理行為研究、車輛行駛狀態(tài)分析、交通道路環(huán)境數(shù)據(jù)采集以及自動(dòng)駕駛與模擬仿真駕駛等研究?jī)?nèi)容。系統(tǒng)提供駕駛模擬仿真和實(shí)車測(cè)試兩種解決方案,可實(shí)現(xiàn)在特定的駕駛模擬仿真環(huán)境以及各種復(fù)雜自然的條件下對(duì)人-車-路-環(huán)境數(shù)據(jù)的采集與分析。實(shí)現(xiàn)人車路交互同步數(shù)據(jù)可視化,客觀定量化分析人-
 產(chǎn)品型號(hào):廠商性質(zhì):生產(chǎn)廠家更新時(shí)間:2025-05-12訪 問 量:1384
產(chǎn)品型號(hào):廠商性質(zhì):生產(chǎn)廠家更新時(shí)間:2025-05-12訪 問 量:1384產(chǎn)品分類
Product Category相關(guān)文章
Related Articles詳細(xì)介紹
| 品牌 | 津發(fā)科技 | 適用領(lǐng)域 | 科研 |
|---|---|---|---|
| 產(chǎn)地 | 國(guó)產(chǎn) | 加工定制 | 否 |
ErgoLAB人車路環(huán)境測(cè)試云平臺(tái)是基于云架構(gòu)的專業(yè)用于“以人為中心"的多模態(tài)數(shù)據(jù)同步采集和定量化分析平臺(tái),專注于駕駛心理行為研究、車輛行駛狀態(tài)分析、交通道路環(huán)境數(shù)據(jù)采集以及自動(dòng)駕駛與模擬仿真駕駛等研究?jī)?nèi)容。系統(tǒng)提供駕駛模擬仿真和實(shí)車測(cè)試兩種解決方案,可實(shí)現(xiàn)在特定的駕駛模擬仿真環(huán)境以及各種復(fù)雜自然的條件下對(duì)人-車-路-環(huán)境數(shù)據(jù)的采集與分析。實(shí)現(xiàn)人車路交互同步數(shù)據(jù)可視化,客觀定量化分析人-車-路-環(huán)境的交互影響機(jī)理及其內(nèi)在因果關(guān)系,有助于提升廣度橫向研究與深度縱向研究。


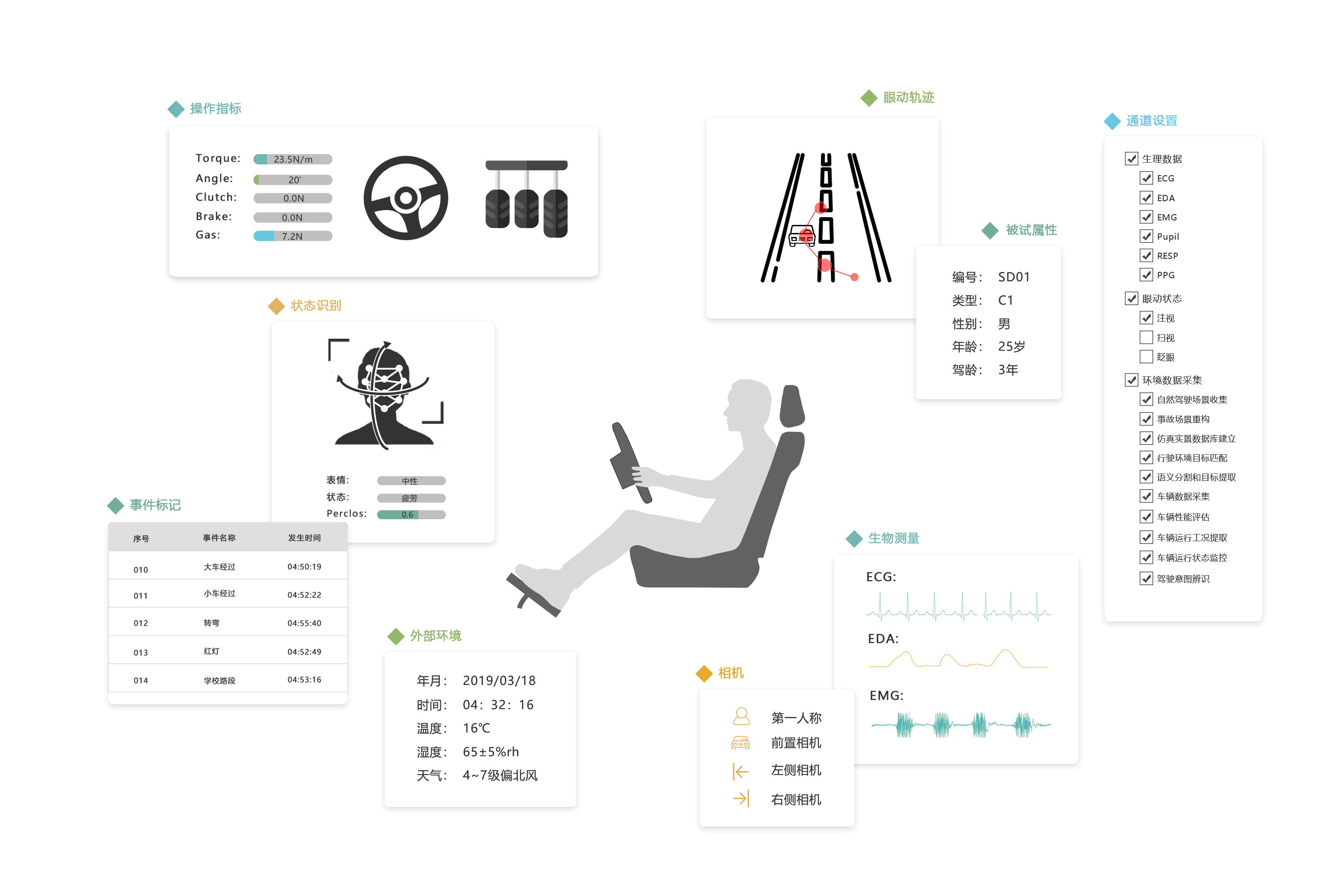
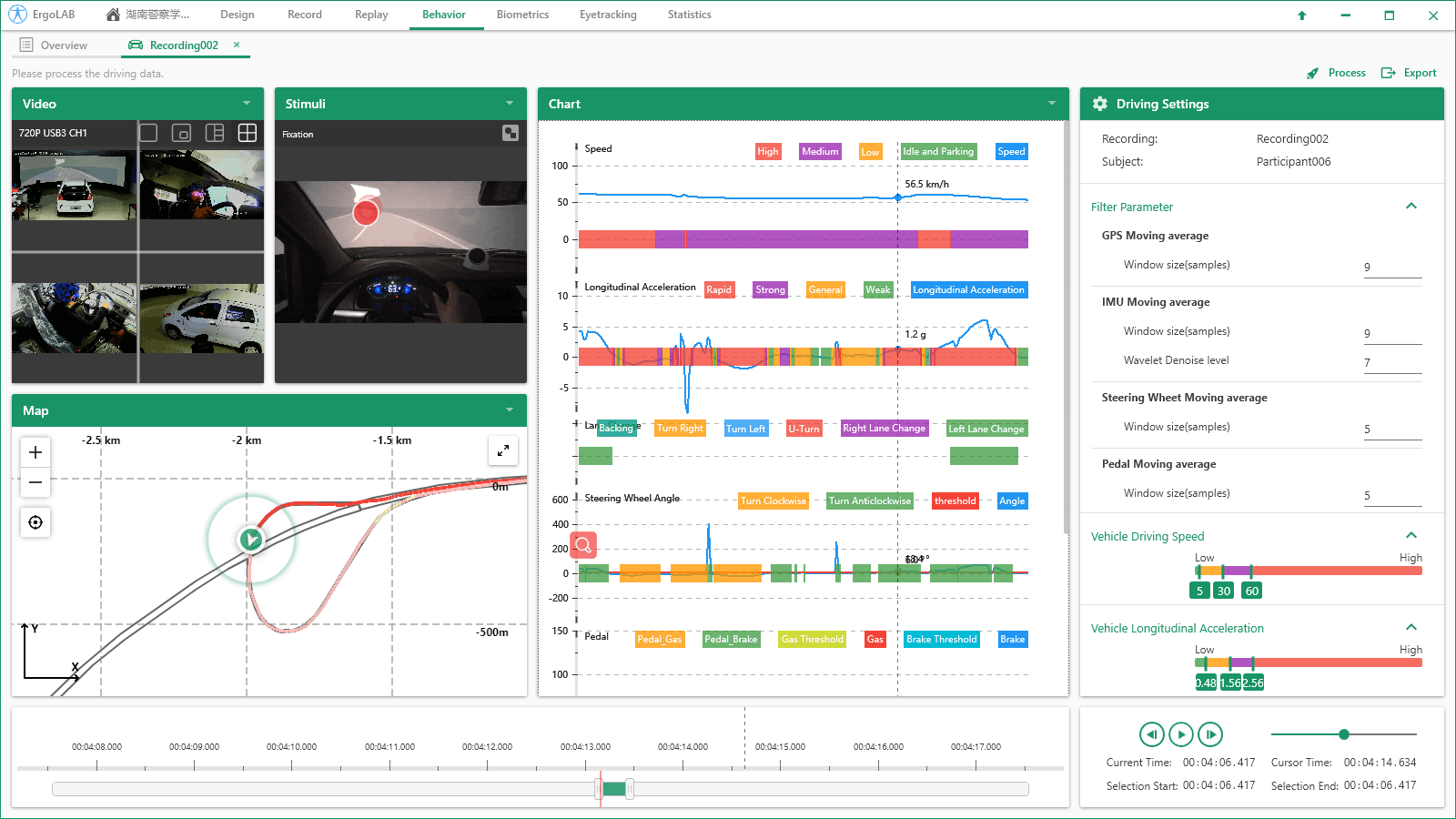
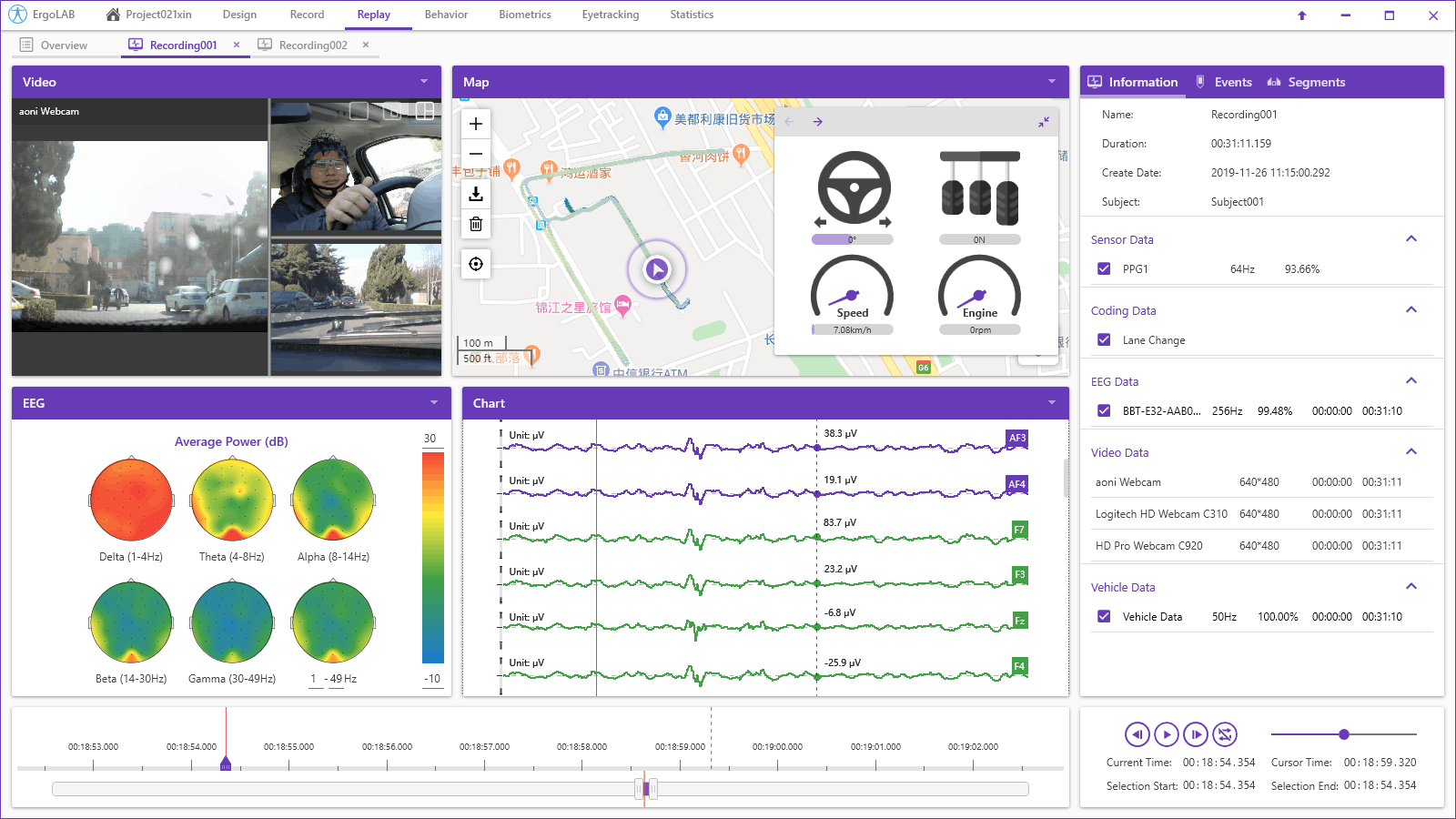
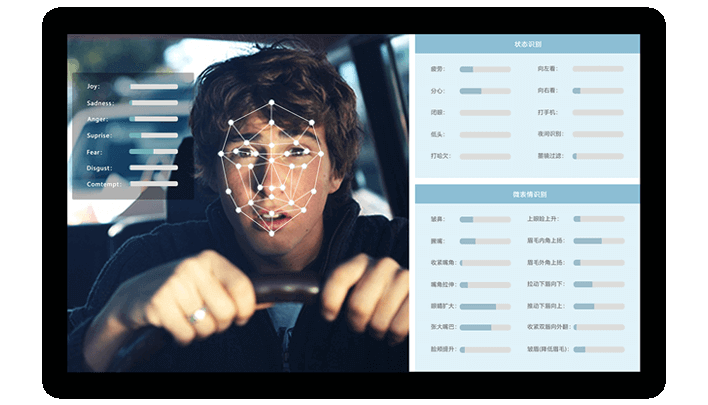

ErgoLAB人機(jī)環(huán)境同步云平臺(tái)可人-機(jī)-環(huán)境多維度數(shù)據(jù)的同步采集與綜合分析,包括眼動(dòng)追蹤、生理測(cè)量、生物力學(xué)、腦電、腦成像、行為、人機(jī)交互、動(dòng)作姿態(tài)、面部表情、主觀評(píng) 價(jià)、時(shí)空行為、模擬器、物理環(huán)境等,為科學(xué)研究及應(yīng)用提供完整的數(shù)據(jù)指標(biāo)。平臺(tái)可完成完整的實(shí)驗(yàn)和測(cè)評(píng)流程,包括項(xiàng)目管理-試驗(yàn)設(shè)計(jì)-同步采集-信號(hào)處理-數(shù)據(jù)分析-人工智能應(yīng)用-可視化報(bào)告,支持基于云架構(gòu)技術(shù)的團(tuán)體測(cè)試和大數(shù)據(jù)云管理。

人機(jī)工程、人的失誤與系統(tǒng)安全、人機(jī)工效學(xué)、工作場(chǎng)所與工效學(xué)負(fù)荷等
從安全的角度和著眼點(diǎn),運(yùn)用人機(jī)工程學(xué)的原理和方法去解決人機(jī)結(jié)合面安全問題
人-車-路-環(huán)境系統(tǒng)的整體研究,有助于改善駕駛系統(tǒng)設(shè)計(jì)、提高駕駛安全性、改善道路環(huán)境等
ErgoLAB可實(shí)現(xiàn)桌面端、移動(dòng)端以及VR虛擬環(huán)境中的眼動(dòng)、生理、行為等數(shù)據(jù)的采集,探索產(chǎn)品設(shè)計(jì)、人機(jī)交互對(duì)用戶體驗(yàn)的影響
研究如何通過城市規(guī)劃與建筑設(shè)計(jì)來滿足人的行為心理需求,以創(chuàng)造良好環(huán)境,提高工作效率
通過ErgoLAB采集和分析消費(fèi)者的生理、表情、行為等數(shù)據(jù),了解消費(fèi)者的認(rèn)知加工與決策行為,找到消費(fèi)者行為動(dòng)機(jī),從而產(chǎn)生恰當(dāng)?shù)臓I(yíng)銷策略使消費(fèi)者產(chǎn)生留言意向及留言行為
 掃一掃,關(guān)注微信
掃一掃,關(guān)注微信
郵箱:sales@kingfar.cn
電話:4008113950






